Les rotors d'antennes
Après une tentative pour l'utilisation
d'un rotor d'azimut de type HAM et la construction d'une commande en site
de type a vis sans fin (mêmes principe que pour les paraboles TV) avec
recopie de la position par potentiomètre et compte tenu de la précision
attendu (1°) j'ai décida de l'acquisition d'un rotor Yeasu G-5500.
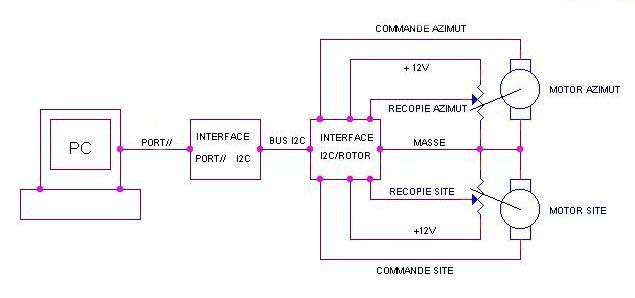
L'interface Rotor / I2C
Pour la commande il suffit de mettre des relais en parallèle sur les
boutons du pupitre de commande. On récupère l'information position
des antennes dans le pupitre de commande (signaux en provenance des potentiomètres).
Le schéma de l'interface rotor /
I2C (fichier pdf)

La conversion analogique/digitale des information potentiometriques est réalisée
par in circuit intégré PCF8591. C'est un circuit A/D a 4 entrées
sur 8bits avec sortie sur bus I2C.
La commande des relais est réalisée par un circuit intégré
PCF8574. C'est un circuit a entrée sur bus I2C avec 8 sorties digitales.
(Il peut également fonctionner en lecture de 8 entrées digitales
et sortie sur bus I2C).
Dans la partie lecture des informations des potentiomètres, 4 résistances
sont marquées"Ajus". Elles permettent de faire la mise a
l'échelle des valeurs lues pour obtenir sur les curseurs des potentiomètres,
des valeurs comprises entre 0 et + 5V. Des valeurs plus faibles peuvent être
utilisées mais en perdant sur la résolution, le PCF8591 codant
ces valeurs sur 8 bits soit 256 pas.
Le dip switch sert a donner l'adresse du PCF8591 ici "010".
Le petit régulateur 5V 78L05 sert a alimenter uniquement la référence
du PCF8591 ceci afin d'éviter des variations de lecture lors de la
commutation des relais.
Dans la partie commande des relais, un ULN2003 sert d'interface de puissance
au PCF8574 pour commander les relais. Sur le schéma, les relais sont
des relais inverseurs, des relais a contacts normalement ouverts conviennent
également.
Le dip switch du PCF8574 doit etre a l'adresse "010".
L'interface Port // vers I2C
Peu de chose a dire sur le
schéma :
Le jumper au +5V ne sert que pour la mise au point et n'est pas a mettre dans
cette application.
Le câble de liaison I2C est un câble récupéré
sur un vieux téléphone, les connecteur sont ceux utilises en
téléphonie, des RJ11.
Le schéma de l'interface Port // vers I2C(fichier
pdf)

Le logiciel
Utilisant professionnellement
visual basic pour la réalisation d'équipements de test, j'ai
décidé de commencer l'écriture d'un programme de poursuite
satellite. Premier obstacle et pas le moindre, comment a partir de données
Kepleriennes, déterminer en temps réel la position d'un satellite.
Après de nombreuses recherches sur le net, je suis arrive sur le site
de David Taylor (auteur du logiciel de prédiction de passage satellite
WXtrack) ou il mettait a disposition la "dll" qu'il utilise dans
son logiciel WXtrack.
Un téléchargement, et c'est le moment des premiers essais...
infructueux dans un premier temps puis oh miracle les coordonnées calculées
sont les mêmes que celles trouvées dans WXtrack.
Une autre recherche sur le net et c'est le téléchargement une
autre "dll" pour le pilotage d'un bus I2C via le port parallèle
du PC.
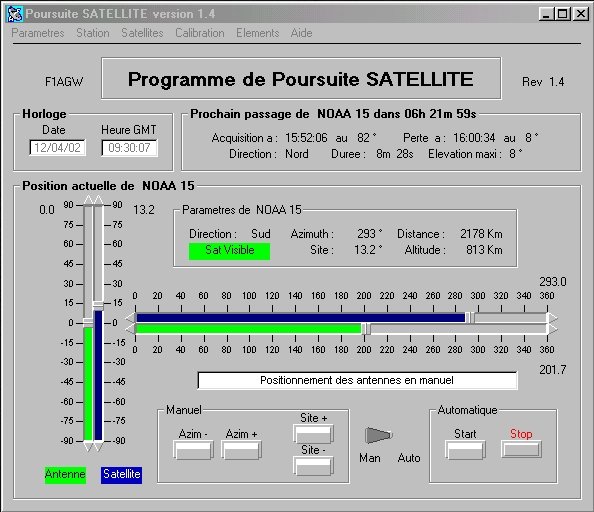
Restait maintenant a écrire le corps du programme, après plusieurs
essais voici comment se présente la page principale.
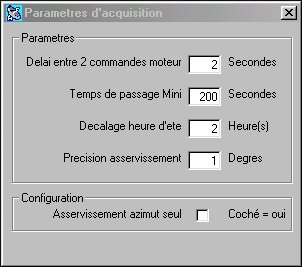
Le Menu Paramètres
Sert a donner le temps entre 2 mesures, la durée minimum d'un passage
et le décalage heure locale/heure TU. Ces valeurs sont mémorisées
dans le fichier "poursuisat.cfg".
Le Menu Station
sert a donner les coordonnées de la station observatrice. Ces valeurs
sont mémorisées dans le fichier "poursuisat.cfg".

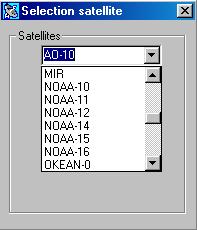
Le Menu Satellite
Permet la sélection d'un satellite parmi ceux contenu dans un fichier
"xxxx.txt ou xxxx.2li."
Le Menu Calibration
Permet au logiciel de connaître la valeurs des potentiomètres
de recopies site et azimut pour les valeurs azimut 0° et 360° ainsi
que les valeurs site 0° et 90°. Ces valeurs sont mémorisée
dans le fichier "poursuisat.cfg"

Le Menu Elements
N'est plus disponible, la NASA ne fournissant plus les éléments
Képlériens sous format 2Lignes.
Par contre TS Kelso a développé un programme qui récupère
les infos a la NASA et les remet au format 2Lignes.
L'adresse est "http://celestrak.com/SpaceTrack/TLERetrieverHelp.asp"
Il faut s'enregistrer a la NASA "http://www.space-track.org/perl/login.pl"
pour être autorisé a télécharger les TLE.
Les fichiers éléments Képlériens doivent se trouver
dans le même répertoire que PourSat.
L'Écran Principal
Le cadre du haut a gauche donne la date et l'heure TU calculée a partir
de l'heure du PC plus le décalage mémorisé dans le menu
Paramètres. Le cadre en haut a droite donne la prévision de
passage du satellite sélectionné dans le menu Satellite. Le
grand cadre du bas donne la position actuelle du satellite. Quatre barre-graphes
indiquent en permanence la position du satellite et des antennes en site et
azimut.
Deux séries de boutons permettent la commande manuelle ou automatique
des antennes.
En prévision des touches pre-programmees pour les satellites géostationnaires.
Ci-dessous une copie écran de la même acquisition de NOAA15 que
précédemment mais après asservissement en automatique
des antennes.

Sommaire


